Topographie et Guidage #11
XI)
Guidage 3D sur bulldozer :
1)
Principe :
Le guidage 3D sur les bulls est sans doute le plus simple à installer, on peut compter 3 types d’installations différentes :
- 1 mât pour l’antenne GNSS et un capteur de devers sur la lame + câblage
- 2 mâts avec 2 antennes GNSS + câblage.
- Un système intégré d’usine dans la machine propre à chaque constructeur.
Chez Topcon, on peut retrouver un montage un peu différents avec 2antennes sur un mat et un capteur de devers.
Pour le guidage avec une station robotisée, il n’y a besoin que d’un prisme et un capteur de devers.
Le fait d’avoir 2 antennes rend le système plus réactif et plus précis, surtout dans les talus.
Avec l’arrivée des centrales inertielles, les mats disparaissent et les antennes sont placées, de manière déportées, sur les toits des cabines. Elles sont moins exposées aux risques d’arrachement et ça supprime des câbles qui sont, eux aussi, exposés. Certain fabricant d’engins ont des accords avec les fabricants de guidage et pré-câblent les machines, il y a juste les équipements à brancher et la calibration à faire. Le fait d’avoir 2 mats va améliorer le positionnement et le systèmes va mieux savoir si l’engin avance ou recule.
Les centrales inertielles remplacent les capteurs de devers, il y en a une sur la machine et une sur la lame et elles enregistrent tous les mouvements et les envois au calculateurs pour déterminé la position de la lame.
Comme pour un mobile GNSS, chaque installation est équipée d’une radio pour pouvoir communiquer avec la base.
En cabine, on va retrouver le calculateur, l’écran et le bouton pour le mode automatique.
2)
Calibration :
Pour chaque système de guidage qui n’est pas monté d’origine, il faut faire une calibration de ou des antennes et du capteurs de vers. La calibration consiste à mesurer l’emplacement des équipements et de certaines caractéristiques machines pour les entrer dans l’ordinateur machine.
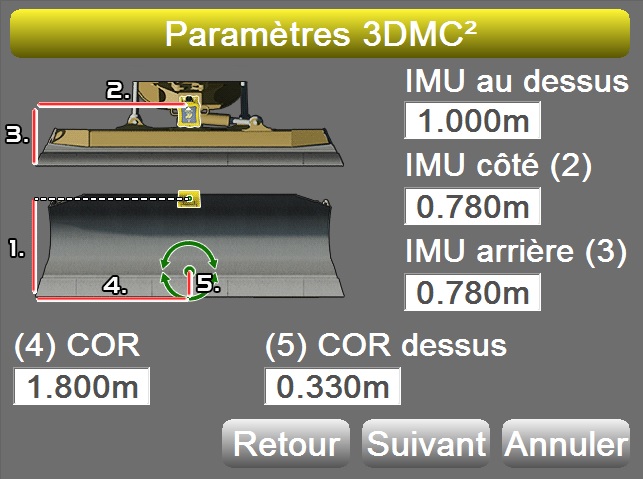
- (1).jpg (88.94 Kio) Vu 5000 fois
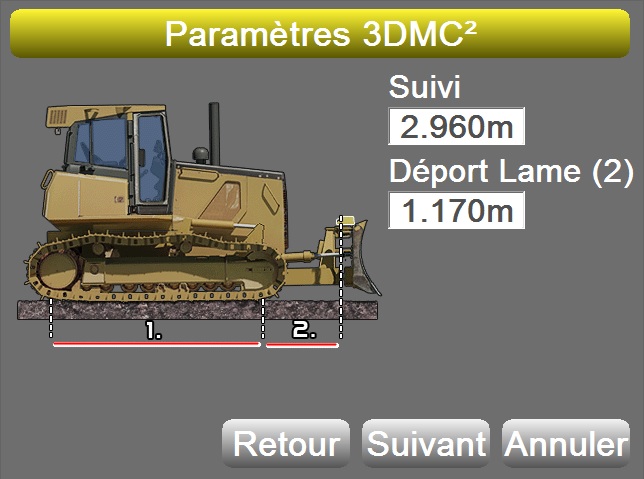
- (2).jpg (75.57 Kio) Vu 5000 fois
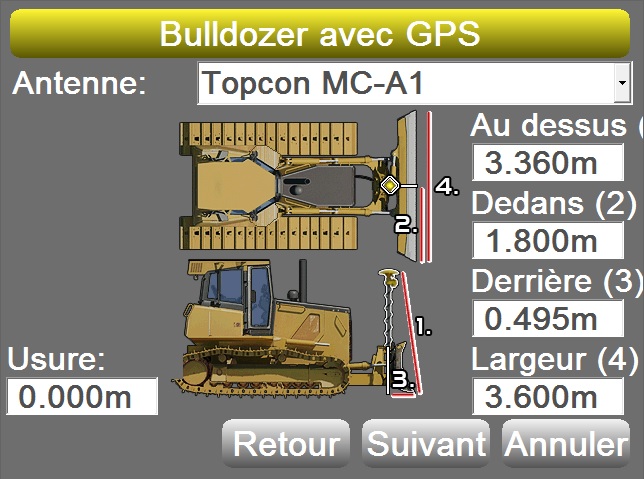
- (3).jpg (107.51 Kio) Vu 5000 fois
3)
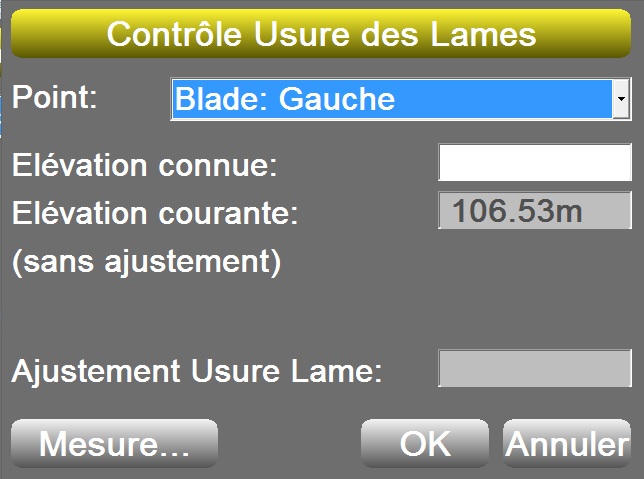
Contrôle position :
Pour vérifier si la calibration est bonne, on réalise un contrôle position. Le géomètre choisit un point donc il connait les coordonnées (X, Y et Z) et on pose un coin de lame sur ce point, les coordonnées calculées par l’ordinateur de la machine doivent être les mêmes. De manière générale on réalise ce contrôle le matin et après manger pour compenser les écarts possible liés aux nombres de satellites captés et à l’usure de lame, surtout pour le Z.
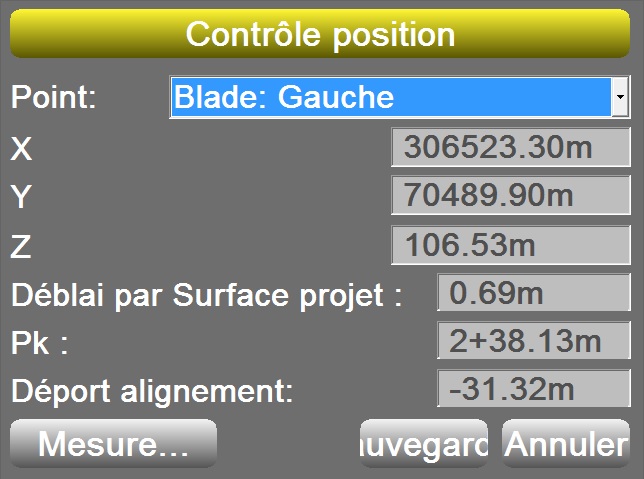
- (4).jpg (77.3 Kio) Vu 5000 fois
- (5).jpg (67.68 Kio) Vu 5000 fois


